
[모션제어] 속도/각도 보정 관련하여 문의 드립니다.
- 클라스
- 4110
- 9
첨부 2
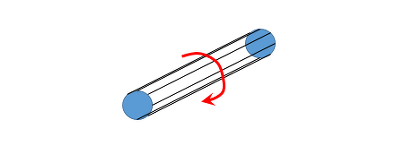
20~30m/min 속도로 Film Feeding하는 장비입니다.
회전하는 도중 실시간 으로 위치값을 보정해야 합니다.
즉, 일정 속도로 회전하다가 측면에서 봤을때(변경시점을 0도로 보고) +XX.x각 또는 -XX.x각으로
옵셋 보정하는 형태입니다.
현재는 속도제어만 하고 있습니다.
위 에 설명한것 처럼 제어 하려면
QD172S CPU / MR-J4-B 조합으로 어떠한 제어 형태가 되어야 할지 조언 구합니다
아울러, 대략적인 기본 파라메터 및 K Program을 어떻게 활용해야 할지 난감하네요.
추가) 모션 기본 파라메터(Servo data)에서 Degree 로 셋팅하고, K Program에서 Speed 제어로 기본 구동 하면서
필요시 각도 만 옵셋으로 보정 가능 할 런지요?
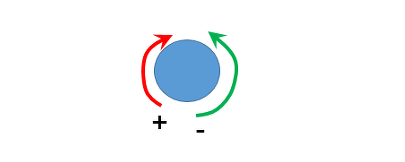
즉, 각도 모드 이므로,,,회전시 현재 각도 값이 계속 변할 것이고... 이때,, 보정하고자 하는 값을 변경하는 것입니다.
보정하려는 시점에 현재 각도 값이 180도 라면,,, 옵셋을 -1도 변경 시키면..순간적으로 179도로 움찔? 하면서..(통신속도 무시)
보정 되지 않을까요?





댓글 9
Film Roll 이면 장력제어를 해야 하는거 아닌가요???
모스
장력은 기본적으로.. Unwinder /rewinder torque 제어 하고요,
In Feeding / out feeding 속도제어로 전체 balance 유지 합니다.
위에 언급한 Roll은 중간에 process 용 Roll 입니다.
mark 취득하여 실시간으로 보정 해야 하고요.
In Feeding / out feeding 속도제어로 전체 balance 유지 합니다.
위에 언급한 Roll은 중간에 process 용 Roll 입니다.
mark 취득하여 실시간으로 보정 해야 하고요.
회전중 정지하지 않고 보정을 하려면, 기구적으로 해결을 해야 하지 않을까요..?
메인 서보는 계속 회전을 하고, 메인서보를 보정하는 서보를 추가 장착.
메인 서보는 계속 회전을 하고, 메인서보를 보정하는 서보를 추가 장착.

속도기준축 또는 가상축에서 전자감속기 거쳐서 Process Roll 로 연결 후 전자감속기 비율값 실시간 제어하시면 될꺼같은데요
곰부리
말씀 하신 컨셉도 고려 중입니다.
다만,, 초기 프로그램 구성시 부터...계획하여 프로그램 된 것이 아니기에..
중간 진로 변경이 난해 하네요.ㅜㅜ
감사합니다.
다만,, 초기 프로그램 구성시 부터...계획하여 프로그램 된 것이 아니기에..
중간 진로 변경이 난해 하네요.ㅜㅜ
감사합니다.
mark를 취득하여 실시간 보정을 해야 한다고 했으니, 그양을 피드백삼아 PID처리로 속도제어를 한다면 어떨까요?
곰부리
네...일단.. 2가지로 방향을 잡았습니다.
mark 취득값 과 속도와 거리 환산한 기울기 값으로 속도 제어를 통한 위치보정을 하려 합니다.
당연 PID처리 해야 할 것 같습니다.
그리고, mark의 편차 기준이 되는 기준롤(보정 해야 할 롤 앞에 있는 롤)과 현재 롤 위치값 실시간
취득하여 비교 보정(PID)_ 물론 mark 취득값이 가장 우선적 기준값으로 되겠고요.
조언 감사합니다.
mark 취득값 과 속도와 거리 환산한 기울기 값으로 속도 제어를 통한 위치보정을 하려 합니다.
당연 PID처리 해야 할 것 같습니다.
그리고, mark의 편차 기준이 되는 기준롤(보정 해야 할 롤 앞에 있는 롤)과 현재 롤 위치값 실시간
취득하여 비교 보정(PID)_ 물론 mark 취득값이 가장 우선적 기준값으로 되겠고요.
조언 감사합니다.
감사합니다
권한이 없습니다. 로그인
