
- 5
- 고신
- 조회 수 2641
서보공정의 기본 순서
PLC레디
(롬쓰기)
QD75레디
서보준비완료
조그 정역기동
(에러표시/리셋)
원점기동
서보기동
위치 입출력(축1위치결정데이터)
(위치 기동)
롬쓰기, 에러표시/리셋, 위치기동은 시험 요구에 맞춰서 넣고 위에 한줄만 외워두면 손이 알아서 프로그래밍 해주네요
서보준비완료에 타이머를 달아서 시작 1회 원점기동도 가능합니다.
서보기구를 동작할 때
1. 이동번호(자동변수)를 자기유지
2. 기동번호에 (축1위치결정데이터) 번호를 입력
3. 이동번호 상승 펄스로 서보기동
4. 서보완료 상승 펄스로 다음 공정에 넘어감
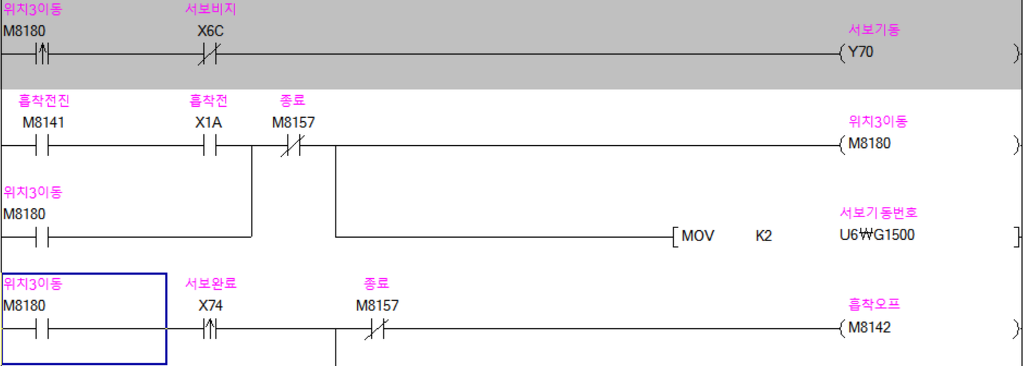
예제의 서보기구를 동작할 때
1. 이동번호(위치3이동)를 자기유지
2. 기동번호에 (K2) 입력
3. 위치3이동 상승 펄스로 서보기동
4. 서보완료 상승 펄스로 흡착 오프에 넘어감







감사합니다.