- 2
- 야수
- 조회 수 4479
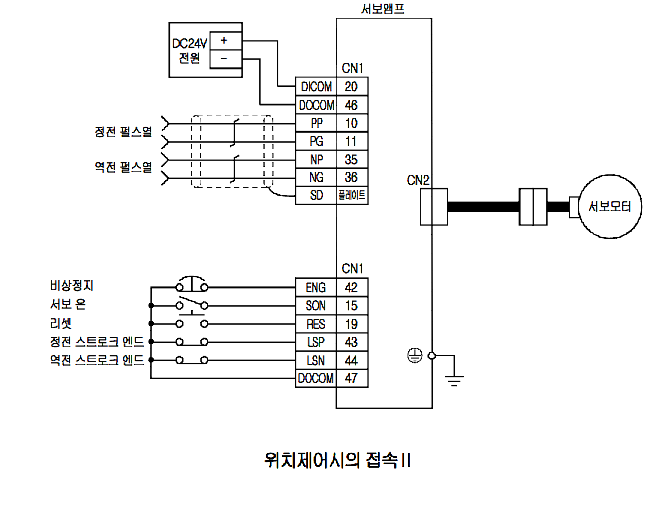
위치제어시의 접속
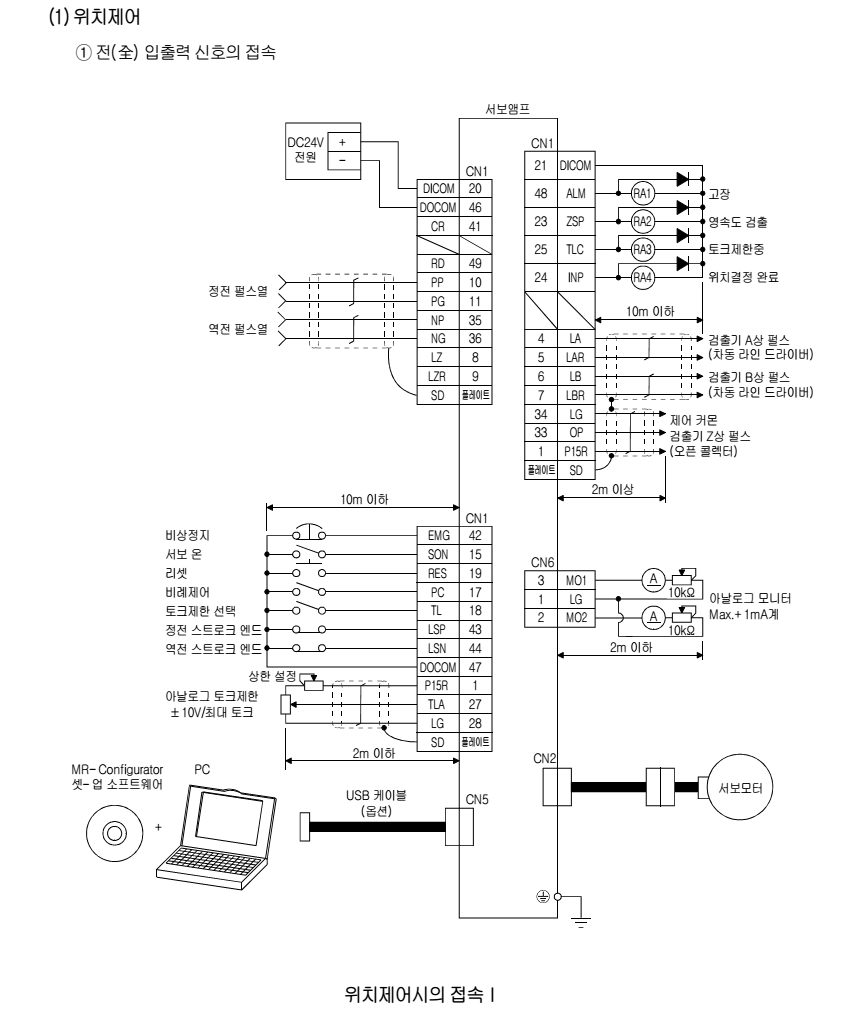
최소한 필요한 입출력 신호의 접속
모터를 움직이기 위해서는, 최소한 아래의 접속이 필요합니다. 출력 신호의 접속은 불필요합니다.
1) 서보 온 ……………………… 주회로를 살리기 위한 신호이므로 운전전에 반드시 온(ON) 해 두는 것이
필요합니다. 온 하면 서보 록 상태가 됩니다.
2) 정·역전 스트로크 엔드 …… 통상 기계단에 있는 리미트 스위치와 접속합니다.
오프(OFF)가 되면 그 방향으로 움직이지 않습니다.
역방향으로 움직입니다.
롤 피드와 같이 기계단 리미트 스위치가 없는 경우에는, DOCOM간을 항시 합선 해주십시오.
3) 정·역전 펄스열 …………… 펄스열이 입력되면, 모터는 펄스의 주파수·수에 대응해서 움직입니다.
입력이 없으면 정지하여 서보 록 됩니다.
4) 리셋 ………………………… 알람의 해제에 사용합니다. 알람 해제는 주회로 전원 오프(OFF)에서도 할 수 있기 때문에,
절대 필요한 신호가 아닙니다.
또 리셋 신호를 온(ON) 하면 서보 록이 해제되고 모터 프리가 됩니다.
5) 비상정지 …………………… 운전시에는, 비상정지 신호(EMG)를 비상정지 스위치(B접점)로 반드시 DOCOM과 합선 해 주십시오.