
서보/모터 서보모터란? 1편
- 사진가
- 15483
- 6
첨부 11
- --.jpg (File Size: 81.3KB/Download: 2)
- 000.jpg (File Size: 96.5KB/Download: 0)
- 111.jpg (File Size: 46.4KB/Download: 0)
- 222.jpg (File Size: 42.7KB/Download: 0)
- 333.jpg (File Size: 43.2KB/Download: 0)
- 444.jpg (File Size: 95.1KB/Download: 0)
- 888.jpg (File Size: 49.1KB/Download: 0)
- 999.jpg (File Size: 60.4KB/Download: 0)
- 5555.jpg (File Size: 78.2KB/Download: 0)
- 6666.jpg (File Size: 39.4KB/Download: 0)
- 7777.jpg (File Size: 29.2KB/Download: 0)
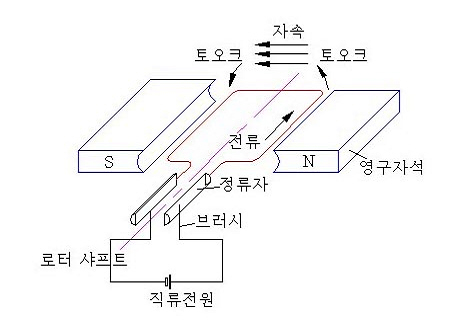
그림 1.1.1 DC 모터의 기본원리
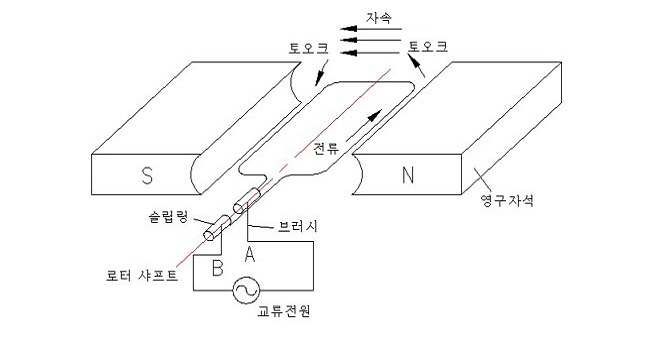
그림 1.1.2 AC 모터의 기본원리(1) - 회전 전기자형
그림1.1.2에서는 DC 모터와 비교하기 쉬운 형태로 브러시와 슬립링을 설치했는데, 같은 원리를 그림 1.1.3의 형태로 나타내면 브러시를 생략할 수 있다. 그림1.1.2를 회전 전기자형, 그림1.1.3을 회전 계자형 이라 부른다. 브러시리스 서보모터의 경우는 회전 계자형을 사용한다.
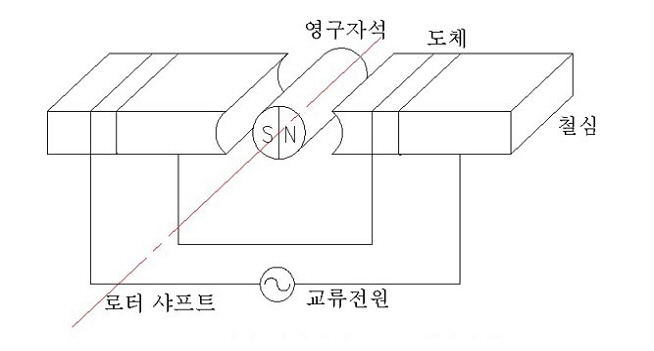
그림 1.1.3 AC 모터의 기본원리(2) - 회전계자형
(3) AC 모터(브러시리스 서보모터)의 원리
브러시리스 모터는 DC 모터가 가진 정류장치를 모터에서 떼어내고, 대신에 전원을 제어 하여 회전자 위치에 맞는 전류를 흘리는 장치 즉, 드라이버에 의해 구동된다. DC 모터는 정류자의 갯수를 늘림으로써 토오크 리플을 적게할 수 있는데, 브러시리스 모터에서는 모터를 3상 권선으로 하고, 각 상의 전류를 구형파 혹은 정현파의 교번 전류를 흘려 구동하다.
그림 1.1.4의 (a),(b)는 3상 브러시리스 모터의 횡단면도 이고, U+,U-,V+,V-,W+,W-는 각 권선의 시작과 끝이다.
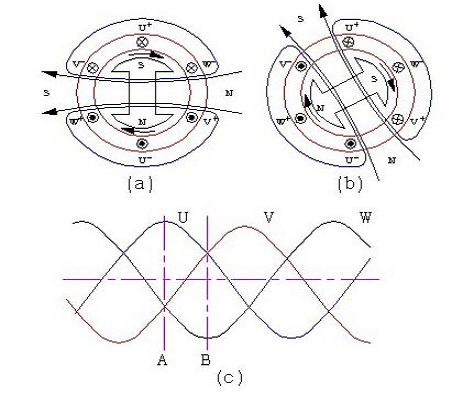
그림 1.1.4 회전자계의 원리
이와 같이 고정자 권선에 3상 교류(정현파 혹은 구형파)전류를 흘리므로써 연속적인 회전자계를 얻을 수 있다. 이 구동전류 위상을 회전자의 회전각에 대하여 항상 직교하는 형태로 맞출 수 있다면 매끄러운 토오크를 내면서 효율이 좋은 모터를 브러시리스로 구성할 수가 있다.
1.1.2 회전자 위치 검출 회로
AC 서보모터에서도 DC 서보모터와 같이 전류의 방향과 자속의 방향을 직교시키기 위해서는 자석의 위치를 정확히 파악하지 않으면 안되다.
그림 1.1.5에는 종래의 인크리멘탈 인코더의 내주부에 자극 위치를 센싱할 수 있는 전용 슬릿이 추가된 인크리멘탈 인코더를 보인다. 자극 검출신호 U,V,W 채널 신호는 AC 서보모터의 극수에 맞춰 각 전기각으로 120도 어긋난 위상차를 갖고 있다. 따라서 검출신호수는 종래의 A,B,Z 채널 외에 U,V,W 채널이 합해져서 6신호가 된다. 이것을 장거리 전송이 가능하도록 라인 드라이버로 출력한다.
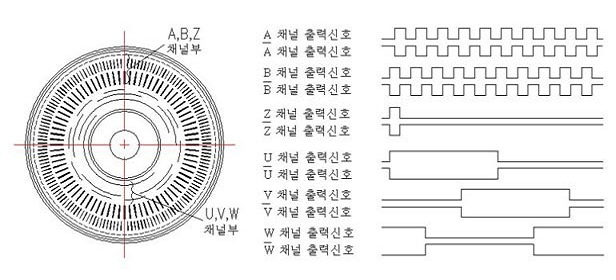
그림 1.1.5 AC 서보모터용 옵티컬 인코더의 출력파형
1.1.3 구동 시스템
이 모터의 동작원리는 앞 절에서 설명한 바와 같이 DC 모터의 정류자 기능을 홀센서(Hall Sensor)와 반도체 전력 변환기로 하고 있다는 것이다. 발생 토오크는 전류와 자속의 곱에 비례하기 때문에 직류기와 동일하게 직교하고 있다.
다음 그림은 구동시스템의 전체 구성등 나타내었다.
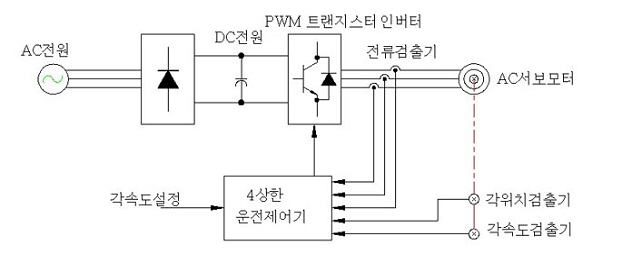
그림 1.1.6 AC 서보모터 구동시스템의 구성
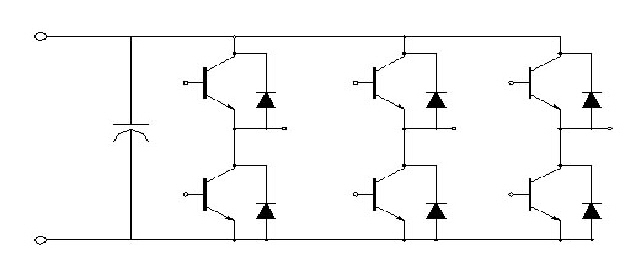
그림 1.1.7 전류제어형 트랜지스터 PWM 인버터의 주회로
그림 1.1.8에서는 AC서보모터 구동 시스템의 제어 블럭 다이어그램을 나타낸다. 회전자의 각위치 검출기로 부터의 신호에 의해 3상의 교류전류(정현파 혹은 구형파)를 발생시키고 그것에 전류 지령치가 곱해져 피드백된 3상 전류와 각각 비교한다. 만일 모터 전류가 지령치에 비해 크게 되면 인버터는 전류를 작게하는 방향으로 스위칭 하고, 반대로 모터전류가 지령치에 비해 크게되면, 인버터는 전류를 크게하는 방향으로 스위칭 하게된다.
속도 신호는 각도 신호의 예측을 위해 피드백 되어, 계의 시간 지연을 작게하고 있다.
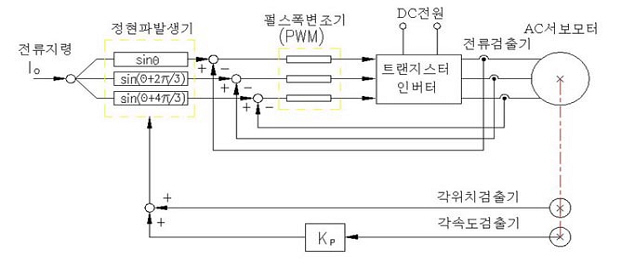
그림 1.1.8 AC 서보모터 구동 시스템 제어 블럭도
2. Servo Drive 의 구성
서보 드라이브의 기본 블럭도를 그림으로 나타내면 그림 2.0.1과 같다. 보통 시판되고 있는 서보 드라이브는 2점 쇄선으로 쌓여있는 속도제어 부분을 유니트로 통합시킨 것이 가장 많다. 위치제어 부분은 제어하려고 하는 기계에 맞춰 제어 시스템을 구성할 필요가 있기 때문에 다종 다양한 형태를 갖게 되는데, 유니트로 통합시키면 약간 범용성이 부족하게 된다. 최근에는 마이크로 컴퓨터의 보급에 따라 상위시스템이 위치및 속도제어 부분을 뭉퉁거려 전류제어 부분을 유니트로 통합시키는 경우도 드물게 있으나 제어의 예리함이란 점에서는 속도 제어 부분이 무난한 것 같다.
서보 드라이브는 크게 1) 서보 모터에 파워를 공급하는 파워변환기 2) 전류제어부 3) 속도제어부 4) 위치제어부에 의해 구성된다.
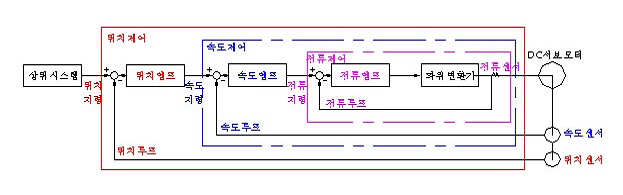
그림 2.0.1 서보 드라이브의 기본 블럭도
2.1 파워 변환기
파워 변환기는 파워 디바이스에 의해 구성되는데, 파워 디바이스의 특징에 따라 선택 하여 사용할 수 있다. 파워 디바이스에는 파워 트랜지스터, 파워 MOSFET, IGBT(Insulated Gate Bi-polar Transistor), IPM(Intelligent power modules)등이 있으며, 이러한 디바이스로 파워 변환기를 구성했을때의 취급가능한 출력과 스윗칭 주파수는 서로 다른 특성을 지닌다. 즉 파워 트랜지스터는 상대적으로 대용량, 저 스위칭 주파수, 파워 MOSFET는 소용량, 고 스위칭 주파수로 동작시키는데 적당하며, IGBT는 위 두소자의 단점을 동시 보완한 것으로서 대용량, 고 스위칭 주파수 동작이 가능하며 아울러 파워 소모가 상대적으로 적은 장점도 갖고 있으며, 최근에 각광을 받고 있는 IPM은 IGBT소자 내부에 보호회로 까지 추가된 디바이스이다. 참고로 가장 대용량쪽에 있어서는 다이리스터(Thyristor) 또는 GTO등이 파워 디바이스로 사용되고 있다.
한편 제어하려고 하는 모터의 형태(DC 서보모터, AC 서보모터, Step Motor 등)에 맞춰 파워 변환기의 구성도 달라진다. 그림 2.1.1에 일반적인 파워 변환기의 구성을 나타내었다.
여기서 C21, C31은 다이리스터(Thyristor)의 위상제어에 의한 DC 서보모터의 한 방향제어, C22, C32는 다이리스터의 위상제어에 의한 DC 서보모터의 가역제어에 쓰인다. C11은 펄스 폭 변조(Pulse Width Modulation, 약칭 PWM)를 함으로써 DC 서보모터의 한 방향 제어가 가능하고, C12는 DC 서보 모터의 가역제어가 가능하다.
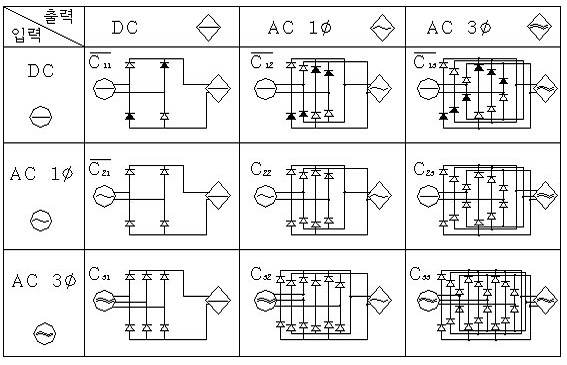
그림 2.1.1 파워 변환기의 구성
모터 제어에 있어서 중요한 개념인 "PWM"은 파워 디바이스의 ON-OFF비율을 변화시켜 모터의 단자전압을 제어하는 방법으로서 그림3.1.2과 같은 개념이다.
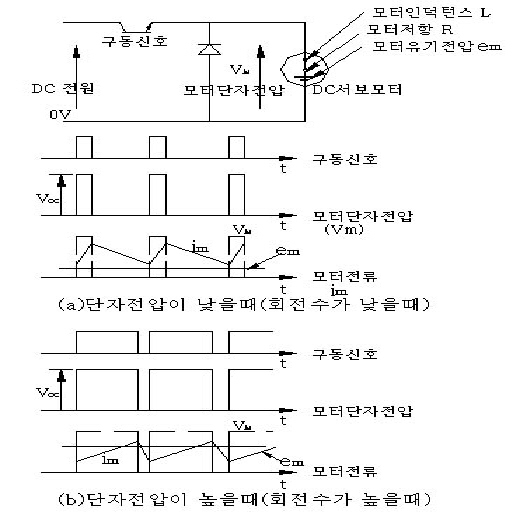
그림 2.1.2 PWM에 의한 모터의 단자전압 제어
통상의 DC 서보 드라이브는 C12의 파워 변환기를 PWM방식으로 구동하는 방법이 일반적이고, AC 서보 드라이브는 C13의 파워 변환기를 PWM방식으로 구동하는 것이 대부분이다.
PWM의 캐리어 주파수(Carrier Frequency)는 서보의 속응성을 나타내는 주파수 특성에 영향을 미치기 때문에, 로스가 허락하는 한 높게 잡을 수 있다.
한편, 파워 디바이스의 상하 아암간 단락을 방지하기 위해 베이스 드라이브 신호에 온-딜레이(on-delay) 회로가 설치되어야 하는데, 이 온-딜레이 시간은 파워 디바이스의 온-딜레이 시간보다 길게 잡을 필요가 있기 때문에 결과적으로 입출력 특성은 불감대를 갖게 된다.





감사합니다.