
서보/모터 서보모터란? 2편
- 사진가
- 12818
- 4
첨부 12
- 1.jpg (File Size: 34.6KB/Download: 0)
- 2.jpg (File Size: 36.3KB/Download: 0)
- 3.jpg (File Size: 18.3KB/Download: 0)
- 4.jpg (File Size: 39.2KB/Download: 0)
- 5.jpg (File Size: 46.3KB/Download: 0)
- 6.jpg (File Size: 37.2KB/Download: 0)
- 7.jpg (File Size: 36.6KB/Download: 0)
- 33333.jpg (File Size: 4.4KB/Download: 0)
- 444.jpg (File Size: 3.9KB/Download: 0)
- 33.jpg (File Size: 4.7KB/Download: 0)
- 1111.jpg (File Size: 4.0KB/Download: 0)
- 2222222.jpg (File Size: 4.1KB/Download: 0)
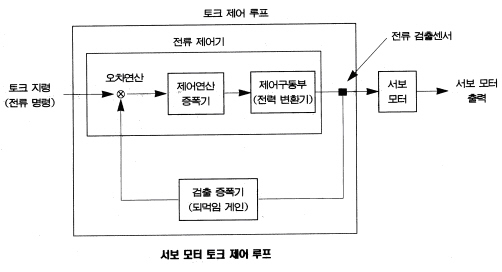
위의 그림은 토크 제어시스템의 블록도를 나타낸 것으로 모터에 인가되는 전류를 검출하여 이를 다시 토크 지령과 비교 연산하여 모터에 전류를 인가하는 형태를 지니고 있습니다.
즉, 토크는 전류에 비례함으로 토크 지령은 전류명령이라 할 수 있습니다.
일반적으로 제어연산 증폭기로는 PID연산 제어기가 적용되는데, 토크제어는 비례제어기만을 많이 사용하고 있습니다. 이는 서버 모터의 제어용도가 속도 제어와 위치 제어용으로 주로 사용되기 때문인데 위의 그림에서 알 수 있듯이 토크제어는 Open-Loop 제어를 하고 있습니다.
2) 속도 제어시스템
: 속도 제어는 일정한 회전력으로 일정 속도를 유지하도록 제어하는 것으로 토크제어가 일정한 힘을 발생시키는 제어라고 하면 속도 제어는 토크를 제어하여 일정한 속도로 회전시키는 제어를 말합니다.
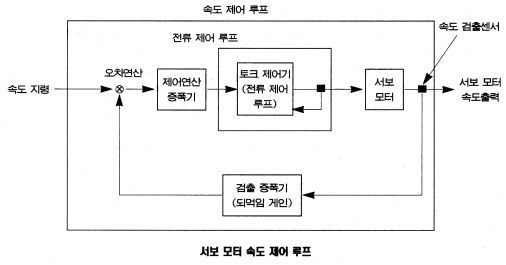
위의 속도 제어 블록도에서 보듯이 서버 모터의 속도 출력에서 검출되는 검출속도의 편차는 제어 연산 증폭기를 통하여 토크제어 루프의 명령으로 주어지는 Close-Loop 제어로 구성되며, 상위제어기가 위치 제어를 하는 제어기를 사용할 경우나 서버 모터의 일정한 속도 출력을 요구하는 제어에 주로 사용됩니다.
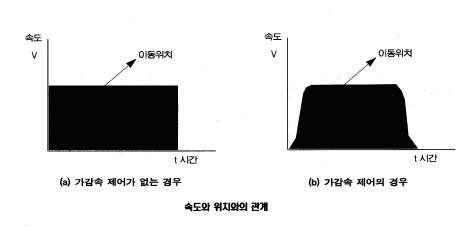
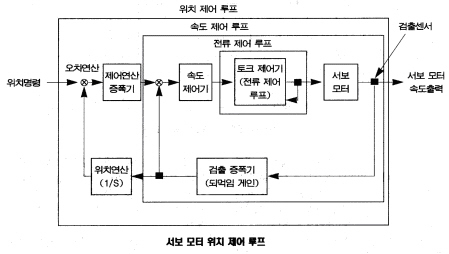
3) 위치 제어시스템
: 서버 모터를 회전시켜 원하는 회전수와 회전각을 정확히 얻어내기 위한 제어로서 내부에 토크제어와 속도제어를 포함하고 있습니다. 이는 서버 모터를 일정한 속도로 회전시키고 또 정지시키는 것을 말하는데, 이것은 회전 속도를 시간 축으로 적분한 것이 위치의 변화가 되며 반대로 속도는 단위시간 동안 위치의 변화를 말하는 것이기 때문입니다.
![]() [m]
[m]
![]() [m/sec]
[m/sec]
3. AC 서보 모터의 구조와 회전
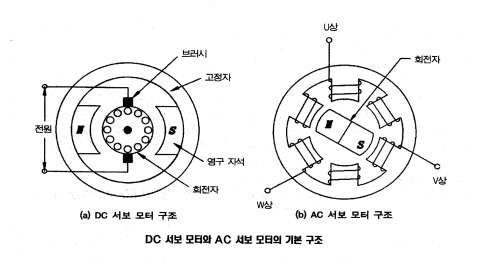
: DC 서버 모터는 계자 권선이 회전자에 있고 AC 서버 모터는 고정자에 있으며, AC 서버모터의 제어 특성이 DC 서버 모터와 같이 선형적으로 제어할 수 있다고 하여 Blushless DC 서버 모터라고 합니다.
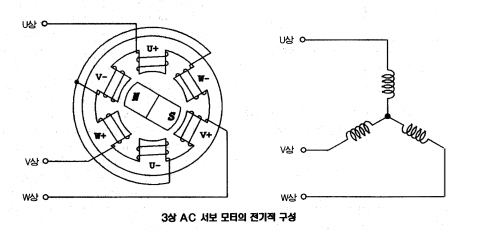
위의 그림은 영구 자석의 극 수가 2개인 3상 2극 AC 서버 모터의 전기적 구조를 나타낸 것으로 고정자에 권선이 감겨져 있으며 영구 자석은 회전축과 연결되어 있어 고정자 권선에 3상 전류를 인가하면 영구 자석은 고정자의 회전자계와 동기 되어 회전하도록 되어 있습니다.
서버모터의 회전수는 회전자에 공급되는 전류의 주파수, 즉 회전 자계의 주파수와 서버 모터의 자극수와 상호 관계가 있으며 그 관계식은
![]() [Hz]
[Hz]
F : 고정자에 공급되는 전원의 주파수[Hz]
P : 회전자의 속도[rpm]
n : 모터의 극수[Pole]
로 나타내어집니다. 여기서 입력 전원의 주파수를 알고 있을 때 회전자의 회전수를 구하여 보면
![]() [rpm]
[rpm]
과 같이 된다.
따라서 만일 3상 60[Hz]의 상용 전원으로 3상 4극 서보 모터를 구동한다면,
![]() [rpm]
[rpm]
과 같이 구해질 수 있습니다.
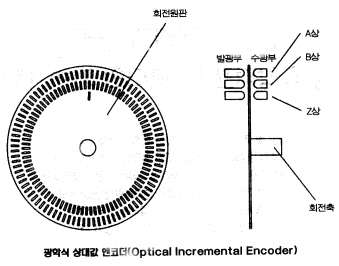
4. 광학식 엔코더의 구성과 동작
: 엔코더는 서버 모터의 구동에 있어서 회전자의 위치를 검출하고 속도 및 위치 제어를 위해서 없어서는 안 되는 중요한 요소로서 엔코더의 회전축이 모터의 회전축과 결합되어 있어 모터의 회전시 같이 회전하며 펄스열을 발생하도록 하고 있습니다.
종류로는 언제든지 현재의 위치값을 알 수 있는 절대값 엔코더(Absolute Encoder)와 현재의 위치를 카운터 혹은 기타 장치를 이용하여 계수하여 두어야만 현재의 절대위치를 알 수 있는 상대값 엔코더(Incremental Encoder)가 있습니다.
이 중 절대값 엔코더의 경우 분해능(정밀도)를 높이기 위하여 기계적인 검출 슬릿을 늘려야 하는데 한계가 있고, 그 한계를 극복하더라도 고가이고 회전수 전체를 알기는 매우 어렵기 때문에 엔코더의 기계적 성격은 Incremental Encoder와 같으나 엔코더 Case 내부에 카운터를 두어 계수하고 이를 직렬 통신을 이용하여 전송하는 방식을 가지는 Semi-Absolute Encoder를 개발하여 적용되고 있습니다. 그러나 이러한 구조로 인해 통신을 위한 방법이 있어야 하고 제조시 단가가 비싸지기 때문에 대부분의 서버모터에서는 Incremental Encoder를 채용하고 있습니다.





감사합니다.