
QD77MS2 / MR-J4 사용시 질문드립니다.
- 알티
- 2045
- 1
첨부 2
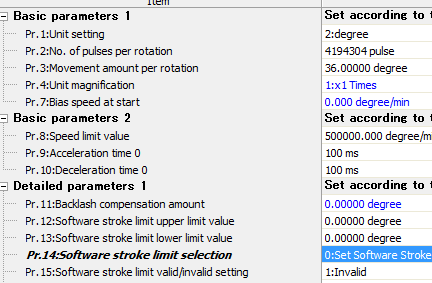
현재 위치결정 각도를 사용하려고 합니다
서버 테스트를 해보고 있는데
ABS로 1. 90 2. 180 3. 270 4. 0 넣었는데
270도에서 0도로 갈떄 359도를 거쳐서 가더군요
기구 적으로 360 회전 하면 안되는 상태라서요 센서선같은게 달려있어서요
0~359도를 왔다갔다하고 359를 넘어서 0도로 가고 싶지 않은데 어떻게 해야할까요
INC로 -값을 넣어주면 되긴 하던데 ABS방식이 편해서요
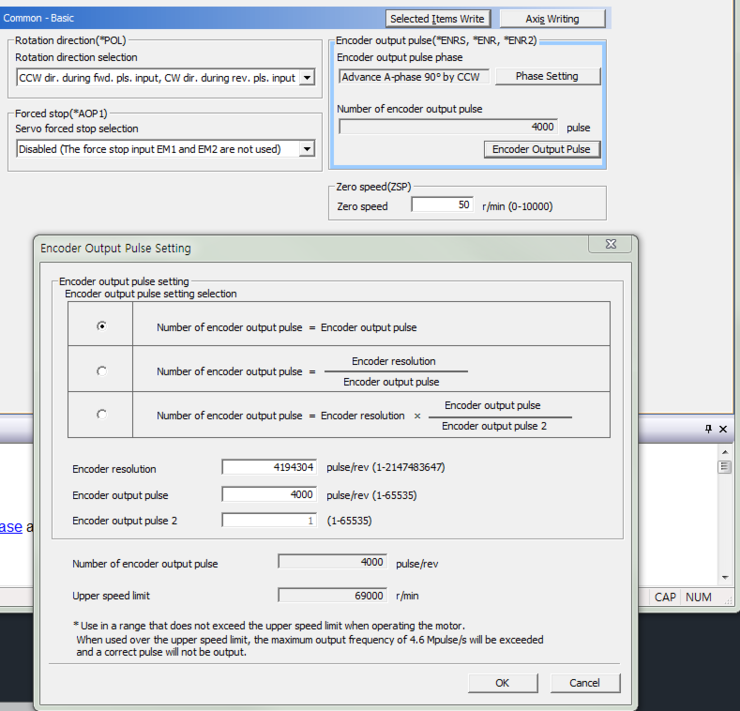
그리고 아래 사진 보시면 여기서 설정하는 엔코더 펄스값은 무엇인가요
전 엔코더 4194304를 4000으로 바꿔주는줄알았느데
아닌거 같아서요
이메뉴가 전자기어비 설정이 맞는건가요?
이상입니다.





QD77MS 위치결정 매뉴얼을 보시면 위치결정시 단위가 DEGREE일때 ABS의 이동방향을 정할 수 있는 지령이 있습니다.
Cd.40항목이며 버퍼메모리는 1550(QD77MS2, 4)번이니 참고해서 사용하시면 원하는 기능으로 사용 할 수 있습니다.
아래 사진의 설정항목은 전자기어비 설정하는 창이 맞습니다.